El vídeo aéreo me llamo la atención desde que empece a estrellar volar aeromodelos, la espectacularidad de las tomas y la posibilidad de recorrer lugares a vista de pájaro fueron algunas de las cosas que me motivaron a comprar una cámara de alta definición, pequeña, liviana y de costo moderado. Escogí la Mobius ActionCam por que su calidad/precio es inmejorable. Sin embargo los resultados en vídeo aéreo no fueron lo esperado, por que el viento y otros factores externos desestabilizan la aeronave dejándonos con vídeos muy movidos en los que difícilmente se aprecia el paisaje.El paso a seguir fue tratar de poner en marcha un sistema que me permitiera mantener la cámara estable sin importar el angulo de la plataforma, como no quería gastar 60USD o mas en un gimbal y ademas tenia un arduino y una placa GY-521 decidí armar uno por mi cuenta.
de alta definición, pequeña, liviana y de costo moderado. Escogí la Mobius ActionCam por que su calidad/precio es inmejorable. Sin embargo los resultados en vídeo aéreo no fueron lo esperado, por que el viento y otros factores externos desestabilizan la aeronave dejándonos con vídeos muy movidos en los que difícilmente se aprecia el paisaje.El paso a seguir fue tratar de poner en marcha un sistema que me permitiera mantener la cámara estable sin importar el angulo de la plataforma, como no quería gastar 60USD o mas en un gimbal y ademas tenia un arduino y una placa GY-521 decidí armar uno por mi cuenta.
Ingredientes:
- Un arduino (Yo utilice un clon nano).
- Un giroscopio + acelerometro: GY 521.
- Dos servos.
- Un mecanismo para servos de dos grados de libertad como este.
- El firmware multiwii mas reciente que pueden descargar gratis del sitio oficial.
- El IDE de arduino.
Paso 1: Conectar el GY-521 y el arduino de la siguiente manera:
| GY-521 | Arduino |
| VCC | 5V |
| GND | GND |
| SDA | A4 |
| SCL | A5 |
Paso 2: Descomprimir el firmware multiwii y realizar lo siguiente:
- Abrir el archivo Multiwii_2_4 > Multiwii > MultiWii.ino
- Seleccionar la pestaña config.h, si no esta visible seleccionarla en la lista desplegable a la derecha.
- En la sección «The type of multicopter» descomentar la linea
//#define GIMBAL
debe quedar
#define GIMBAL
- En la sección «boards and sensor definitions » descomentar la linea
//#define GY_521
debe quedar
#define GY_521
- Finalmente subimos el código al arduino.
Paso 3: Conectar los servos de la siguiente manera:
| Servos | Arduino |
| Rojo o Naranja | 5V |
| Negro o Marron | GND |
| Amarillo o Blanco | A0 para el servo pitch y A1 para el servo roll |
Paso 4: Abrir el software de configuración para el firmware en multiwii_2_4 > MultiWiiConf > application.windows32 > MultiWiiConf.exe.
- En la parte izquierda seleccionar el puerto COM donde este conectado el arduino.
- Clic en start y luego en read.
- En la parte superior seleccionar la opción servos y luego gimbal.
- Activar live.
- Modificar los valores para centrar la plataforma, establecer el limite del giro y establecer la cantidad de compensación.
Con eso tendríamos un sistema capaz de compensar la inclinación del avión para mantener la cámara estable. Las primeras pruebas han arrojado resultados muy satisfactorios, solo me falta reforzar un poco el sistema de los servos para evitar que se mueva y genere sacudidas por el peso de la cámara. Estaré actualizando esta entrada cuando el sistema este completamente implementado.
Actualización Julio 09 de 2015:
El prototipo funciona muy bien, por ahora el punto débil es la parte mecánica que por el peso de la cámara y la elasticidad del material tiende a vibrar, ya estoy trabajando en un soporte diferente para la cámara.
Por ahora el paso a seguir es quemar la placa de circuitos, soldar todo y realizar nuevas pruebas.
PCB: Este es mi diseño inicial para la placa de circuitos en la que serán soldados los elementos una vez finalice la fase de pruebas.
Fue concebida para extraer el mayor potencial del hardware y software que fue utilizado así que se añadieron entradas para conectar un receptor RC y poder controlar manualmente el angulo de la cámara o para utilizar el circuito como estabilizador de vuelo en una aeronave no tripulada.
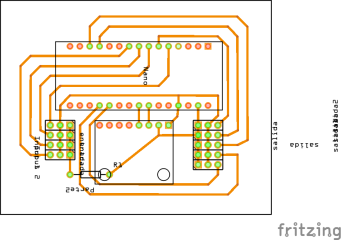
Este archivo lo puedes descargar como pdf o en formato .fzz para editar en Fritzing.
- A la izquierda están las entradas del control remoto.
- A la derecha las salidas.
- R1 es un puente, por ahora no he encontrado la forma de eliminarlo.

{kind=link}
Un comentario en “Gimbal DIY: Arduino + GY – 521”